Auteur : Églantine Bigot-Doll_
DOI : https://doi.org/10.48568/y8pp-c389
I. Bricolage et Bricologie
La bricologie[1], logiquement, ce serait la science du bricolage. Si la science produit de la connaissance par l’étude, la réflexion ou la pratique, le bricolage est la faculté de « faire avec les moyens du bord ». Ce terme récent du XXème siècle sous-entend l’action de la main au contact d’un outil en vue de réparer ou de fabriquer un objet ou une installation.
Ce tour d’esprit se révèle par l’aptitude aux jeux, la débrouillardise, l’aptitude à se tirer de difficultés complexes ou à tirer parti de moyens de fortune, l’aptitude à établir des plans, parfois le goût de fabriquer, de réaménager, le goût du bricolage. »[2]
Logiquement, il semble dès lors opportun de connecter les deux notions de bricolage et d’artisanat faisant a priori intervenir la main sur l’objet physique avec, parfois même, une forme d’empathie[3] envers l’objet manipulé. Or l’artisanat, à l’inverse du bricolage, se réfère à un savoir-faire transmissible de « main en main » dans le temps et au sein d’une discipline établie[4]. Bricoler en revanche consiste à répondre, par la main et sur la matière certes, à un problème contextualisé et inédit.
Au début du XX° siècle, Pablo Picasso et Georges Braque investissent les techniques de collages et assemblages, donnant pour la première fois ses lettres de noblesse au [bri]collage. En architecture, cette stimulation de l’imaginaire en termes de représentation se développe notamment autour des compositions et collages déjantés produits dans les années soixante par le courant de la Superarchitecture et les contre-utopies[5] de Superstudio et Archigram. Aujourd’hui rien ne semble plus véniel que de bricoler dans toute démarche créative, mais qu’en est-il de la matérialité générée par cette pratique a priori approximative, et quelles en sont les composantes ?
Dérivée étymologiquement du mot bricolage, la bricologie serait ainsi tout acte qui, grâce aux outils dont on dispose « à portée de main », produirait une forme de connaissance par le faire. Dextérité ou exécution de qualité approximative, la notion revêt en elle-même cette particularité polysémique et antagonique. On perçoit dès lors la largesse de la marge d’indétermination comportée par la pratique de la bricologie, ainsi que le potentiel de créativité impliqué. Le terme est en réalité un néologisme issu de l’association des noms bricolage et technologie. Le présent commentaire tente de cerner les enjeux de la bricologie en tant que pratique dans le cadre d’une démarche créative de l’architecte instrumentée par un outillage archaïque ou avancé envers une matérialité architecturale exploratoire. L’une des fins légitimes de cette discipline résiderait ainsi dans son extension logique vers les procédés de Conception/Fabrication assistée par ordinateur (C/Fao).
II. Bricologie : variables et invariants
Le bricoleur répare, améliore ou crée, en somme il intervient sur la matière à l’aide d’un objet technique selon la terminologie empruntée à Gilbert Simondon. Il compartimente sa boîte à outils selon taille ou fonction de chacun des individus à classer, agençant ainsi la taxinomie propre à sa pratique. L’outil se distingue de la machine par sa composition élémentaire : emmanchement et tête, l’un au contact de la main, l’autre intervenant sur la matière, le tout forme un système indivisible, solide et stable[6].
De fait, on peut distinctement identifier trois variables inhérentes à la bricologie. Deux d’entre elles sont d’ordre factuel : l’outil et la matière, la troisième est perceptivo-motrice, il s’agit du geste de la main, de l’action. De plus, André Leroi-Gourhan, lorsqu’il dresse son inventaire des techniques[7], distingue les techniques d’acquisition des techniques de consommation, chacune intrinsèque à un milieu. Notre discipline dite architecture, si on la considère en tant qu’habitat au sens anthropologique de Leroi-Gourhan, recrute des techniques vouées à une forme de consommation située.
Chez le bricoleur architecte, l’invariant c’est la main au contact de l’emmanchement qui forme un système de prothèse, prolongation d’un membre associé au référentiel anthropologique[8]. Et c’est pourtant bel et bien de cet invariant que nait la marge d’imprécision nécessaire et générée par le geste intuitif que Simondon établit comme antérieur à la sensorialité[9]. Hasard pur, forme et information[10] se conjuguent et se déclinent au sein de ces interfaces.
On pourrait répertorier dans un tableau matriciel ces trois paramètres selon un repère normé x, y et z. Néanmoins les combinaisons offertes par une telle expérience ne feraient pas état de cas tels que x², comme “recouper le déjà coupé”, soit en d’autres termes les pratiques récursives et/ou itératives. Un groupe d’étudiants[11] de Licence de l’ENSAL se sont livrés à cet exercice en tant qu’approche à la fois intuitive et structurée de la matière. Une fois le stade du geste spontané franchi, on remarque de toute évidence que le geste sensible et orienté, ainsi que l’observation par l’outil macro-photographique, prend l’ascendant dans la démarche. La volonté d’apporter une valeur esthétique – et c’est peut-être ici l’une des multiples façons par lesquelles se distingue l’architecte bricoleur du bricoleur générique – à cette série d’expériences est avérée.
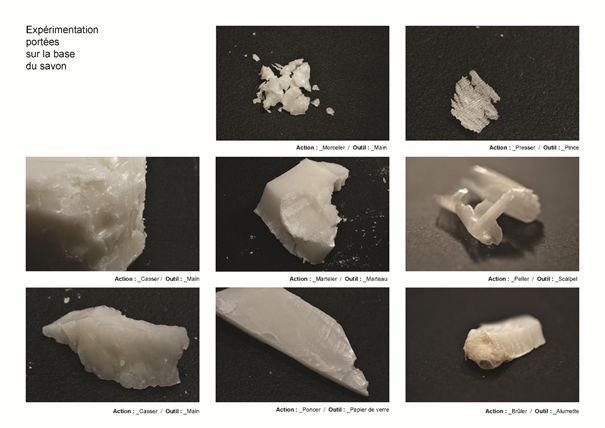
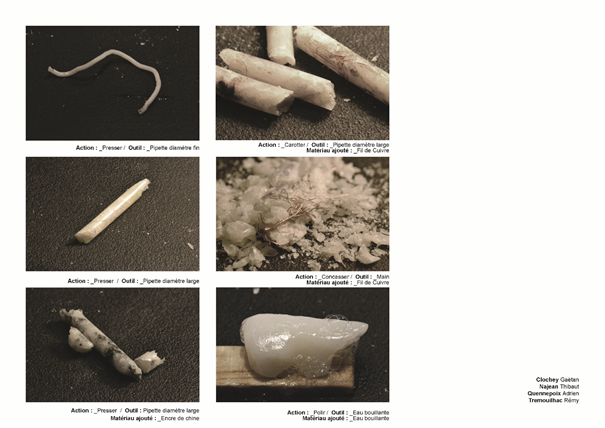
Figure 1. « Matériau, Outil, Action » Travail d’étudiants illustrant les interactions des 3 variables.
III. Combinatoire et décision
Le choix de l’outil semble prescrit par sa fonction initiale. Le geste de la main est ainsi dicté par la forme de l’emmanchement et la tête de l’outil approprié à une action précise allouant une marge d’indétermination plus moins aiguë à son utilisateur.
Prenons l’exemple du marteau, outil primitif par excellence selon Ernst Kapp : sa forme semble toute indiquée à « taper fort sur quelque chose ». Le bricoleur tape sur un clou, l’architecte frappe une tôle pour lui donner un aspect « bouchardé » spécifique, quant au meurtrier, il frappera un grand coup sur le crâne de sa victime.
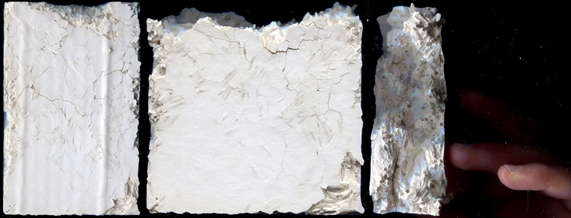
Figure 2. « Matériau, Outil, Action », test physique : Plâtrée de riz.
On peut détourner les objets de leur usage premier par combinaison « hors prescription ». Les outils sont en premier lieu les vecteurs d’un dispositif, ce pour quoi ils sont conçus, formant le couplage outil/utilisateur. Le bricoleur éclairé crée des « agencements avancés » à travers une combinatoire de gestes, outils et matériaux inventoriés par son expérience sensorielle. Ainsi il fabrique de nouvelles interfaces. C’est ce que Gilles Deleuze et Félix Guattari appelaient couplages et systèmes de ponction propres aux machines désirantes[12]. Le bricolage est le produit de ces multiples couplages.
« L’architecte bricologiste » fabriquerait-il des interfaces ontologiques émettrices à la fois de technicité et de valeur esthétique ? Pourrions-nous entrevoir ici une forme de poïetique-bricologique de la matière ?
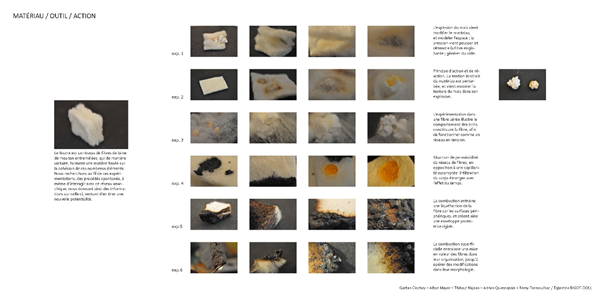
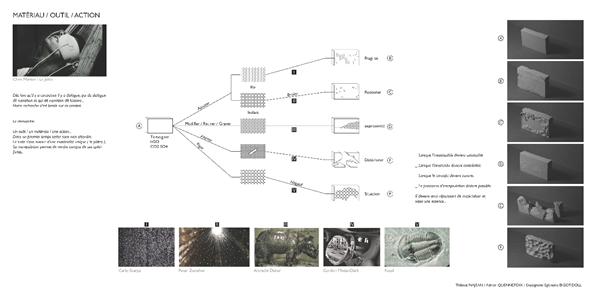
Figure 3. « Matériau, Outil, Action », Tableaux synoptiques.
IV. Enjeux en matière de CF/ao
De ces hybridations, sont émises des stratégies et dispositifs inédits apportant technicité et bricolages avancés : il s’agit bel et bien de la bricologie que nous avons tenté de cerner dans le présent article. De plus, le cas des outils numériques pour la conception et la fabrication nous amène à observer la quasi disparition de notre féconde marge d’indétermination autrefois produite par le geste de la main au contact de l’emmanchement. En effet, considérant l’objet technique « pelleteuse », le geste, bien que fortement réduit, demeure lors du guidage de l’engin. Il est retranscrit analogiquement sur le joystick. C’est encore le cas chez la souris d’ordinateur ou de la voiture : le pilotage est exécuté par l’utilisateur via un gouvernail ou une télécommande. L’imprimante 3d ou la machine à commande numérique, en revanche, opèrent le pilotage numériquement selon les injonctions des lignes de code[13].
Deux aspects de cette redéfinition du bricolage avancé doivent retenir notre attention : la recherche de cette nouvelle marge d’indétermination établie par la gestuelle hybride et somatechnique[14] d’une part, les nouvelles interfaces rendues possibles par l’intervention de tels objets techniques d’autre part.
Or, la désignation de machine entant qu’objet technique complexe n’est plus tout à fait la même à l’heure de l’essor des outils de C/Fao. En effet, le bras robotisé ou la machine à commande numérique ne sont à présent que des emmanchements numériques à proprement parler parmi lesquels l’imprimante 3d serait en somme une variante améliorée du pistolet à colle. Par ailleurs, alors que le bricolage traditionnel segmentait main/emmanchement, le bras robotisé se fractionne au point emmanchement/tête de l’outil.
En cette gestuelle encodée et ce glissement de discontinuité réside tout l’enjeu ontologique de la bricologie de l’architecte en termes de techniques de fabrication assistée par ordinateur. L’utilisateur ne pilote plus l’outil par la main mais par une encapsulation[15] instinctive et sensible antérieure produisant une action mécanique après encodage. L’architecte bricologiste se voit dès lors régir une interface supplémentaire : emmanchement/tête + tête/matière. Notre tableau matriciel mériterait d’être revisité pour désormais figurer des variables telles que : code, emmanchement, tête, action, matière, etc. Ainsi, univers somato-perceptif et somato-digital semblent converger vers une matérialité exploratoire à mesure que s’enchaînent les scansions encapsulantes de la bricologie.
V. Références
Andrieu, Bernard. Les avatars du corps : Une hybridation somatechnique. Montréal: Liber, 2011.
Bigot-Doll, Eglantine. « Les étudiants, les analogies et le numérique : le DéM SPA_Can, ENSA de Lyon. » DNArchi, 28 avril 2015. http://dnarchi.fr/culture/les-etudiants-les-analogies-et-le-numerique-le-dem-spa_can-ensa-de-lyon/.
Braun, Emily, Megan Fontanella, et Carol Stringari. « Touch and Empathy ». In Alberto Burri : The Trauma of Painting, 50‑59. New York, NY: Solomon R. Guggenheim Museum & Kunstsammlung Nordrhein-Westfalen (Germany), 2015.
Carpo, Mario. The Alphabet and the Algorithm. Writing Architecture. Cambridge, Mass.: MIT Press, 2011.
Deleuze, Gilles, et Félix Guattari. Capitalisme et schizophrénie 1 : L’Anti-Œdipe. Collection « Critique ». Paris: Éditions de Minuit, 1972.
Kapp, Ernst. Principes d’une philosophie de la technique. Traduit par Grégoire Chamayou. Pour demain. Paris: Librairie philosophique J. Vrin, 2007.
Leroi-Gourhan, André. Milieu et techniques. Paris: Albin Michel, 1973.
Quennepoix, Adrien, Thibaut Najean, Gaëtan Clochey, Rémy Tremouilhac, et Alban Mayer. « Matériau, Outil, Action ». Rapport d’Action Personnelle, Licence 3. Lyon: ENSAL, 2015.
Rouillard, Dominique. Superarchitecture: le futur de l’architecture, 1950-1970. 1re éd. Librairie de l’architecture et de la ville. Paris: Éditions de la Villette, 2004.
Sennett, Richard. Ce que sait la main : La culture de l’artisanat. Traduit par Pierre-Emmanuel Dauzat. Paris: Albin Michel, 2009.
Simondon, Gilbert. Du mode d’existence des objets techniques. Paris: Aubier, 2012.
———. Gilbert Simondon : entretien sur la mécanologie. Entretien réalisé par Jean Le Moyne. 16mm (trois bobines), 1968. http://www.christian-faure.net/2010/02/19/gilbert-simondon-entretien-sur-la-mecanologie/.
———. Imagination et invention, 1965-1966. Édité par Nathalie Simondon et Jean-Yves Chateau. Paris: Presses Universitaires de France, 2014.
——————————————————————————————————
[1] Néologisme repris par l’Unité de Recherche de l’Ecole nationale supérieure d’art de la Villa Arson.
[2] Mounier, Traité du caractère,1946, p. 640.
[3] Emily Braun, Megan Fontanella, et Carol Stringari, « Touch and Empathy », in Alberto Burri: The Trauma of Painting (New York, NY: Solomon R. Guggenheim Museum & Kunstsammlung Nordrhein-Westfalen (Germany), 2015), 50‑59.
[4] Richard Sennett, Ce que sait la main : La culture de l’artisanat, trad. par Pierre-Emmanuel Dauzat (Paris: Albin Michel, 2009).
[5] Dominique Rouillard, Superarchitecture: le futur de l’architecture, 1950-1970, 1re éd, Librairie de l’architecture et de la ville (Paris: Éditions de la Villette, 2004).
[6] Gilbert Simondon: entretien sur la mécanologie, entretien réalisé par Jean Le Moyne, 16mm (trois bobines), 1968, http://www.christian-faure.net/2010/02/19/gilbert-simondon-entretien-sur-la-mecanologie/.
[7] André Leroi-Gourhan, Milieu et techniques (Paris: Albin Michel, 1973).
[8] Ernst Kapp, Principes d’une philosophie de la technique, trad. par Grégoire Chamayou, Pour demain (Paris: Librairie philosophique J. Vrin, 2007).
[9] Gilbert Simondon, Imagination et invention, 1965-1966, éd. par Nathalie Simondon et Jean-Yves Chateau (Paris: Presses Universitaires de France, 2014).
[10] Gilbert Simondon, Du mode d’existence des objets techniques (Paris: Aubier, 2012).
[11] Adrien Quennepoix, Thibaut Najean, Gaëtan Clochey, Rémy Tremouilhac, Alban Mayer, « Matériau, Outil, Action », Rapport d’Action Personnelle, Licence 3 (Lyon: ENSAL, 2015).
[12] Gilles Deleuze et Félix Guattari, Capitalisme et schizophrénie 1 : L’Anti-Œdipe, Collection « Critique » (Paris: Éditions de Minuit, 1972).
[13] Mario Carpo, The Alphabet and the Algorithm, Writing Architecture (Cambridge, Mass.: MIT Press, 2011).
[14] Bernard Andrieu, Les avatars du corps : Une hybridation somatechnique (Montréal: Liber, 2011).
[15] Eglantine Bigot-Doll, « Les étudiants, les analogies et le numérique : le DéM SPA_Can, ENSA de Lyon. », DNArchi, 28 avril 2015, http://dnarchi.fr/culture/les-etudiants-les-analogies-et-le-numerique-le-dem-spa_can-ensa-de-lyon/.
